Personal Projects¶
mjswan ¶
mjswan is a browser-based mujoco playground built on top of mujoco wasm, onnxruntime, and three.js. This enables MuJoCo simulations with real-time trained policy control, running entirely in the browser - no server for simulation required.
Working closely with the mujoco team at Google DeepMind, mjlab and viser developers at UC Berkeley, a gaming company, etc.
Skills
MuJoCo ,
ONNX Runtime ,
Vue.js ,
Vuetify ,
Vite ,
Node.js ,
NPM ,
Three.js ,
![]() MyoSuite ,
Python ,
HTML ,
CSS ,
JavaScript ,
WebAssembly ,
GitHub ,
Reinforcement Learning
MyoSuite ,
Python ,
HTML ,
CSS ,
JavaScript ,
WebAssembly ,
GitHub ,
Reinforcement Learning

MyoChallenge 2024 ¶
As a member of the MyoSuite community and the MyoChallenge Advocacy Team, I created a blog explaining the general process of participating in the MyoChallenge 2024 competition. The blog was cited on the official website and featured by the official account on SNS (Linkedin, X)
Formed a team neuroflex with international enthusiasts and won 3rd place in the Bimanual Task and the DEI Team Award.
Skills
![]() MyoSuite ,
Gym ,
MuJoCo ,
PyTorch ,
Docker ,
Python ,
GitHub ,
Reinforcement Learning
MyoSuite ,
Gym ,
MuJoCo ,
PyTorch ,
Docker ,
Python ,
GitHub ,
Reinforcement Learning



Galton Board Simulator ¶
The Galton Board, also known as the Galton box, quincunx or bean machine, is a device that visually demonstrates the central limit theorem by dropping balls through a pegged board, resulting in a normal distribution.
I developed a 2D simulator as an Android app using box2d as a physics engine. It uses the accelerometer sensor in the device (phone, laptop) to change the gravity in the simulation, resulting in a different distribution.
Skills
C++ , Qt , Box2D (Physics Engine) , GitHub

Overall Manufacturing Process of Myoelectric Prosthetic Hand ¶
Prior to joining the lab, I had the opportunity to engage in the overall process of creating a myoelectric prosthetic hand. The process I experienced involved the following key components:
- Manufacturing a Conductive Silicone sEMG Sensor and a Sensor Band to wrap them around the forearm
- Building an embedded system, which included:
- Assembling the hardware components
- Writing the firmware (Signal Processing, Feature Extraction, Neural Network, Bluetooth Communication, etc) in C
- Constructing the mechanical hand itself
- Developing a tablet application in C++ to interface with the prosthetic hand
- Silicone Finger Manufacturing (as part of another student's research)
Skills
C (programming language) , C++ , Qt

Voice Controlled Robot Hand ¶
I built my own robot hand from cardboard, servo motors, string, etc., connected it to a Raspberry Pi and a USB microphone, and used voice recognition to control it with my voice.
The idea behind this project was to enable anyone to operate a high DOF prosthetic hand without training, as I felt that operating a prosthetic hand with electrical signals from muscles is intuitive but difficult to achieve high DOF.
Skills
Python , Raspberry Pi

TETRIS on Arduino Game Console ¶
I created a classic game console using an Arduino Nano and a lot of LEDs. To extend the controllable pin capacity of the Arduino Nano, I used shift registers (SN74HC595). I soldered 136 LEDs by hand onto a universal board (I know, it's a menace...), allowing independent control of each LED via the Arduino Nano. Using matrix processing, I developed TETRIS in the Arduino language, carefully implementing boundary conditions and block collision avoidance to ensure that the game runs smoothly and is less prone to bugs.
Skills
Arduino , Soldering , Game Dev
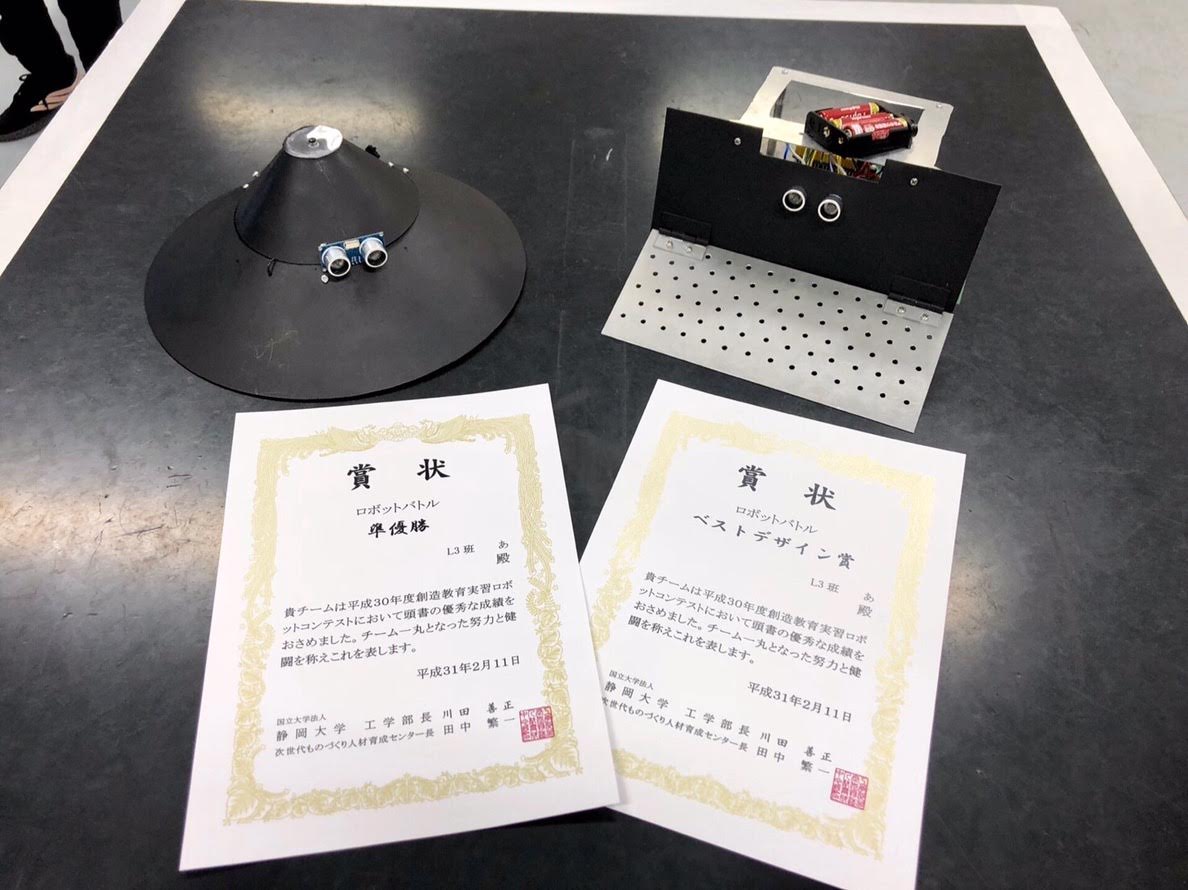
Robot Battle Competition¶
As part of a class project, our team developed two robots for the Robot Battle Competition. We had to adhere to strict criteria, (e.g., weight, size, cost limitations), to develop our robots that can remain on stage for a longer period of time than competitors. As a result of our efforts, we won 2nd place in the competition and also received the Best Design Award.
Skills
Arduino , Soldering , Signal Processing , Robotics , Electronics